@Fabric Foundation #ROBO $ROBO
Hoje mais cedo, eu me peguei olhando para um registro de tarefas mais longo do que provavelmente deveria. Um pequeno robô de armazém havia acabado de completar uma rota simples dentro de uma simulação do Fabric. Não era nada dramático. O robô simplesmente moveu o inventário de um local para outro, o tipo de tarefa que acontece milhares de vezes todos os dias em sistemas logísticos modernos.
O que chamou minha atenção não foi o robô em si. O que chamou minha atenção foi o sistema esperando por provas de que a tarefa realmente havia acontecido antes de confirmar o resultado no livro razão. Esse pequeno momento fez a ideia central por trás do Fabric Protocol de repente parecer muito mais clara para mim.
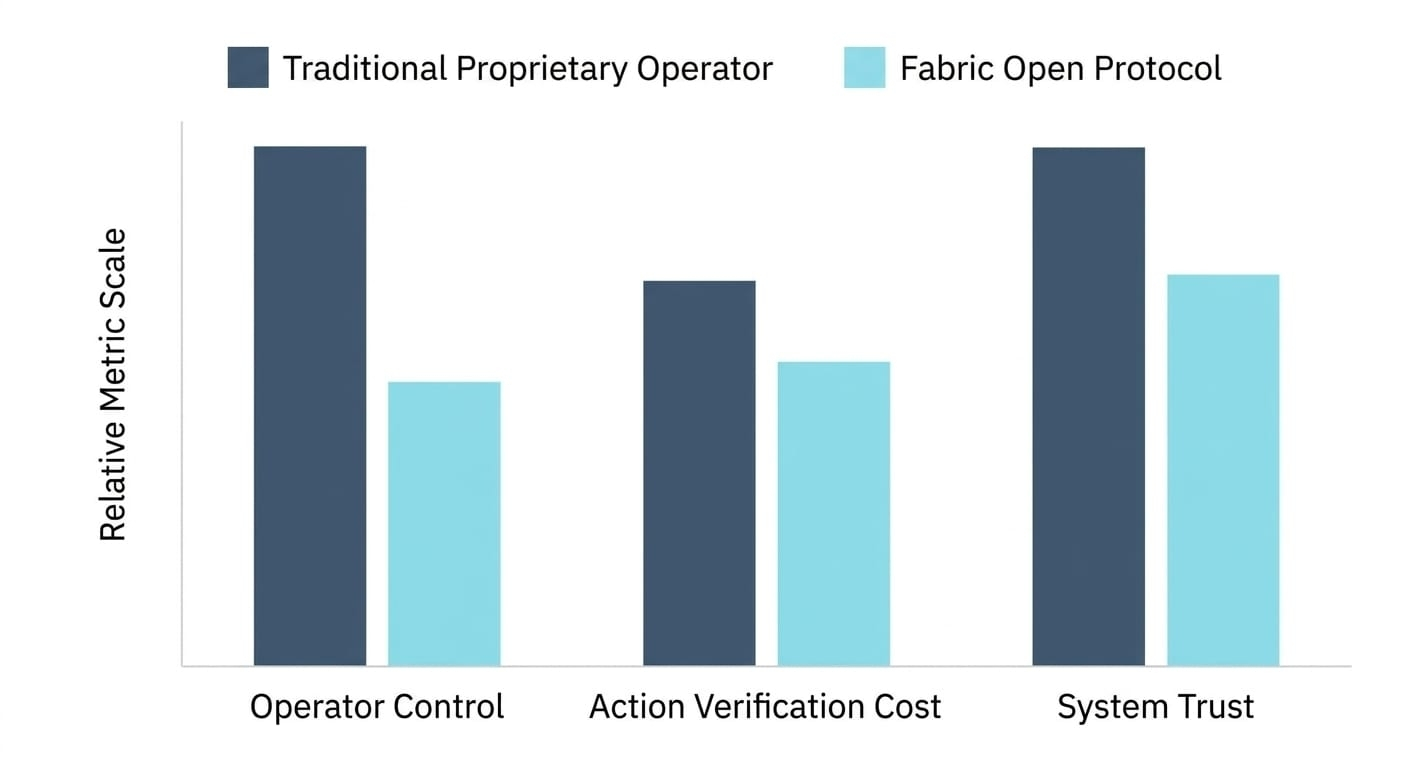
A maioria dos sistemas robóticos hoje opera dentro de ambientes fechados. Uma empresa possui os robôs, controla o software, armazena os dados e decide se um trabalho foi concluído corretamente. Tudo funciona porque o operador controla todo o sistema e todos simplesmente confiam nos registros do operador.
A Fabric aborda o problema de uma forma ligeiramente diferente. Em vez de depender completamente de quem opera os robôs, a rede tenta verificar a ação em si. Quando um robô realiza uma tarefa, o sistema produz evidências computacionais mostrando o que aconteceu durante essa ação. Essa evidência pode então ser verificada e registrada em um livro-razão compartilhado, de modo que o resultado se torne verificável além da empresa que possui a máquina.
A ideia parece simples quando você a descreve assim. Mas, no momento em que você começa a imaginar isso fora de uma simulação controlada, percebe o quão complicadas as coisas podem se tornar. Ambientes reais são imprevisíveis. Sensores podem ler objetos incorretamente. Conexões de rede podem falhar no pior momento possível. Os robôs às vezes se comportam de maneiras estranhas.
A Fabric tenta lidar com essa incerteza mudando o foco da reputação para a computação. Em vez de perguntar quem relatou que a tarefa aconteceu, o sistema procura evidências mostrando que a tarefa realmente ocorreu.
O que realmente me interessou não foi apenas a camada de verificação, mas a questão do ecossistema maior. Se os robôs podem operar dentro de uma infraestrutura compartilhada onde suas ações podem ser verificadas, máquinas pertencentes a diferentes empresas poderiam eventualmente interagir através da mesma rede.
Em algum lugar dentro dessa infraestrutura está o $ROBO, atuando como a camada econômica que recompensa a comunicação honesta e a validação de tarefas. Sem incentivos, a coordenação entre sistemas independentes se torna muito difícil muito rapidamente.
Quando o livro-razão finalmente confirmou a tarefa concluída do robô, lembrou-me de algo simples. Sistemas que interagem com o mundo real raramente parecem perfeitos. Eles passam por confirmações e ajustes até que tudo concorde.
Foi então que percebi que a Fabric poderia estar construindo algo maior do que apenas mais uma plataforma robótica.
Pode ser que esteja construindo um lugar onde as máquinas aprendem a provar que seu trabalho realmente aconteceu.