Ewolucja #blockchain infrastruktury została całkowicie zdefiniowana przez to, jak sieci osiągają konsensus i rozdzielają wartość. Pierwsza generacja wykorzystywała Proof of Work (PoW), wymagając ogromnej ilości energii obliczeniowej do zabezpieczenia księgi. Druga generacja przeszła na Proof of Stake (PoS), zastępując zużycie energii zablokowaniem kapitału.
Jednakże, w miarę jak Web3 rozwija się w sektorze Zdecentralizowanej Fizycznej Infrastruktury (DePIN), pojawiła się krytyczna wada architektoniczna. Zablokowanie kapitału jest wystarczające do zabezpieczenia cyfrowych inteligentnych kontraktów, ale jest całkowicie niewystarczające do zarządzania gospodarką maszynową.
Aby zasilać @Fabric Foundation Fabric Protocol, sieć wymaga mechanizmu konsensusu, który mierzy i nagradza rzeczywistą, fizyczną użyteczność. Wprowadza to rdzeń silnika ekonomicznego protokołu: Dowód Pracy Robotów (PoRW).
Wada pasywnej tokenomiki w DePIN
W tradycyjnych finansach zdecentralizowanych (DeFi) modele stakowania działają na podstawie pasywnego zysku. Użytkownik blokuje parę płynności lub natywny token w umowie inteligentnej, a protokół automatycznie emituje nowe tokeny na podstawie czasu blokady i wielkości stawki. Właściciel aktywów nie jest zobowiązany do wykonywania jakiejkolwiek aktywnej pracy; sama obecność ich kapitału to, co generuje zysk.
Gdy stosuje się do fizycznej sieci maszyn, ten pasywny model szybko degraduje strukturalne zdrowie ekosystemu. Jeśli firma robotyczna wdraża flotę autonomicznych humanoidów magazynowych do sieci blockchain, ale te roboty siedzą bezczynnie w stacji ładującej przez sześć miesięcy, sieć nie zyskuje żadnej fizycznej użyteczności. Jeśli protokół używa standardowego modelu PoS, operatorzy tych bezczynnych robotów nadal otrzymaliby emisje tokenów tylko za utrzymywanie maszyn podłączonych do sieci.
Tworzy to poważną spiralę inflacyjną śmierci. Protokół nieustannie emituje i dystrybuuje tokeny, rozcieńczając krążącą podaż, bez odpowiedniego wzrostu w zbiorczym wyniku ekonomicznym sieci (tj. rzeczywista praca wykonana). Wartość tokena załamuje się, ponieważ zysk nie jest wspierany przez weryfikowalną produktywność fizyczną.
Fabric Protocol @Fabric Foundation ściśle odrzuca pasywne emisje. W $ROBO gospodarce "leniwy kapitał" nie zarabia nic. Aby uzyskać wartość z sieci, węzeł maszyny musi aktywnie wykonywać weryfikowalną pracę.
Definiowanie dowodu pracy robotów (PoRW)
Dowód pracy robotów to kryptograficzna struktura, która łączy emisję tokena $ROBO bezpośrednio z weryfikowanymi zadaniami fizycznymi lub obliczeniowymi. W tym modelu robot traktowany jest jako górnik w sieci, ale zamiast algorytmów haszujących, wydobywa $ROBO poprzez wykonywanie instrukcji w świecie fizycznym.
Aby zakwalifikować się do nagród PoRW, węzeł maszyny musi przyczynić się do sieci w jednym z trzech konkretnych wektorów:
Wykonanie pracy fizycznej: Maszyna skutecznie wykonuje mechaniczne zadanie zlecone przez sieć lub zdecentralizowaną aplikację (dApp). Obejmuje to autonomiczną logistyka (np. dron dokonujący dostawy), przemysłową produkcję lub zbiór rolniczy.
Dostawa obliczeń brzegowych: Nowoczesne roboty są wyposażone w zaawansowane procesory pokładowe zaprojektowane do widzenia komputerowego i mapowania przestrzennego. Kiedy robot jest fizycznie bezczynny, może skierować swoją nieużywaną moc GPU/CPU z powrotem do Fabric Protocol, aby przetwarzać zadań sztucznej inteligencji w sposób zdecentralizowany, skutecznie działając jako węzeł obliczeniowy na brzegu.
Weryfikacja generowania danych: Autonomiczne agenty nieustannie absorbują dane środowiskowe. Robot czworonożny poruszający się po zakładzie przemysłowym generuje wysokiej jakości mapy LiDAR i dane telemetryczne cieplne. Przesyłając te weryfikowalne, zanonimizowane dane do zdecentralizowanej warstwy magazynowej protokołu, maszyna wykonuje "pracę" poprzez wzbogacanie wspólnej inteligencji sieci.
Kryptograficzna weryfikacja stanu fizycznego
Największym wyzwaniem inżynieryjnym w DePIN jest "Problem Orakla" dla sprzętu fizycznego: Jak cyfrowy blockchain może definitywnie wiedzieć, że fizyczny robot rzeczywiście przeniósł pudełko z punktu A do punktu B, a nie tylko symulował dane?
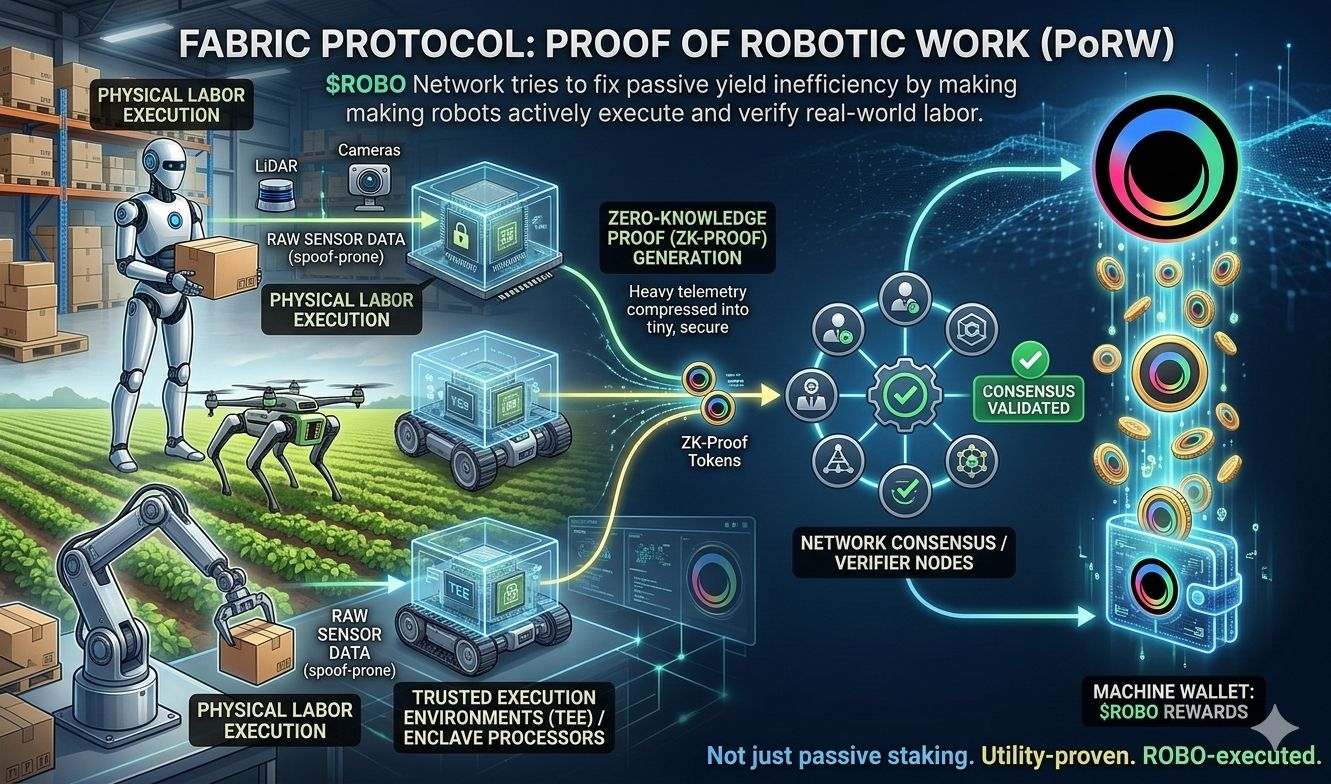
Fabric Protocol rozwiązuje to poprzez rygorystyczny proces weryfikacji sprzętu i oprogramowania z wykorzystaniem zaufanych środowisk wykonawczych (TEE) i dowodów zerowej wiedzy (ZK).
Kiedy robot wykonuje zadanie, generuje strumień telemetryczny czujników (współrzędne GPS, dane z akcelerometru, moment obrotowy silnika i dane z kamer). Aby zapobiec oszustwom operatora przy tym danych w celu uzyskania nielegalnych nagród #ROBO , surowe dane sensorowe są bezpośrednio kierowane do pokładowego TEE robota, bezpiecznej, izolowanej enklawy w procesorze sprzętowym, która nie może być manipulowana, nawet przez właściciela maszyny.
Wewnątrz TEE ta telemetria jest kryptograficznie podpisana i kompresowana w dowód zerowej wiedzy. Ten ZK-dowód jest następnie przesyłany do węzłów weryfikacyjnych protokołu Fabric. Sieć może matematycznie zweryfikować, że zadanie fizyczne zostało ukończone dokładnie tak, jak zlecono, bez potrzeby pobierania lub przetwarzania ciężkich, surowych danych wideo i sensorycznych.
Tylko gdy zdecentralizowane węzły weryfikacyjne uzyskują konsensus w tej ZK-dowodzie, protokół uznaje "Pracę" za zakończoną. Po walidacji umowa inteligentna automatycznie wykonuje rozliczenie, uwalniając płatność ROBO do zdecentralizowanego portfela maszyny.
Projektowanie doświadczenia operatora
Z perspektywy projektowania produktu, skuteczne wdrożenie PoRW wymaga przetłumaczenia tej wysoce złożonej fizycznej kryptografii na bezproblemowe doświadczenie użytkownika.
Tradycyjne pulpity stakowania są proste; wyświetlają ilości tokenów oraz roczną stopę zwrotu (APY). Jednak pulpit PoRW musi skutecznie łączyć sfery fizyczną i cyfrową. Operatorzy węzłów zarządzający flotą robotów potrzebują interfejsów, które upraszczają proces weryfikacji kryptograficznej, jednocześnie zapewniając głęboką widoczność efektywności sprzętu.
Strukturalny projekt konsoli operatora Fabric koncentruje się na "Czasie pracy vs. Czasie ziemskim." Wizualizuje nie tylko, czy robot jest podłączony do sieci, ale także jego wskaźnik sukcesu w wykonywaniu zadań, ostrzeżenia o degradacji czujników oraz weryfikowalne wyniki obliczeniowe. Projektując czyste, bogate w dane interfejsy, protokół zapewnia, że operatorzy sprzętu mogą optymalizować swoje floty robotów w celu maksymalizacji zysku ROBO bez konieczności rozumienia podstawowej kryptografii zerowej wiedzy walidującej ich czujniki.
Wpływ makroekonomiczny na token $ROBO
Wdrożenie dowodu pracy robotów radykalnie zmienia makroekonomiczną charakterystykę tokena ROBO. Efektywnie ustala harmonogram emisji tokena w odniesieniu do produktu krajowego brutto (PKB) sieci Fabric.
W okresach niskiej aktywności sieci, kiedy mniej zadań fizycznych jest zleconych i wykonywanych, emisja ROBO automatycznie zmniejsza się. Protokół płaci tylko za rzeczywistą użyteczność. Z drugiej strony, gdy adopcja sieci rośnie, a tysiące robotów wykonują miliony codziennych zadań, prędkość tokenów i nagrody zwiększają się równolegle z wartością w świecie rzeczywistym, która jest generowana.
Eliminując pasywny zysk i egzekwując kryptograficzną weryfikację pracy fizycznej, Fabric Protocol zapewnia, że ROBO pozostaje strukturalnie solidnym aktywem użyteczności, izolowanym od inflacyjnych spiral śmierci, które dręczą sieci infrastrukturalne pierwszej generacji.