Lo sviluppo della robotica tradizionale richiede spesso risorse finanziarie significative, hardware specializzato e ambienti di ricerca avanzati. A causa di queste barriere, solo un numero limitato di organizzazioni e istituzioni è storicamente riuscito a partecipare all'innovazione robotica all'avanguardia.
I modelli di collaborazione decentralizzati mirano a cambiare questa dinamica. Abilitando la partecipazione distribuita, ecosistemi come quello in fase di sviluppo da @Fabric Foundation potrebbero consentire a sviluppatori, ingegneri e ricercatori di tutto il mondo di contribuire all'innovazione robotica attraverso un'infrastruttura condivisa.
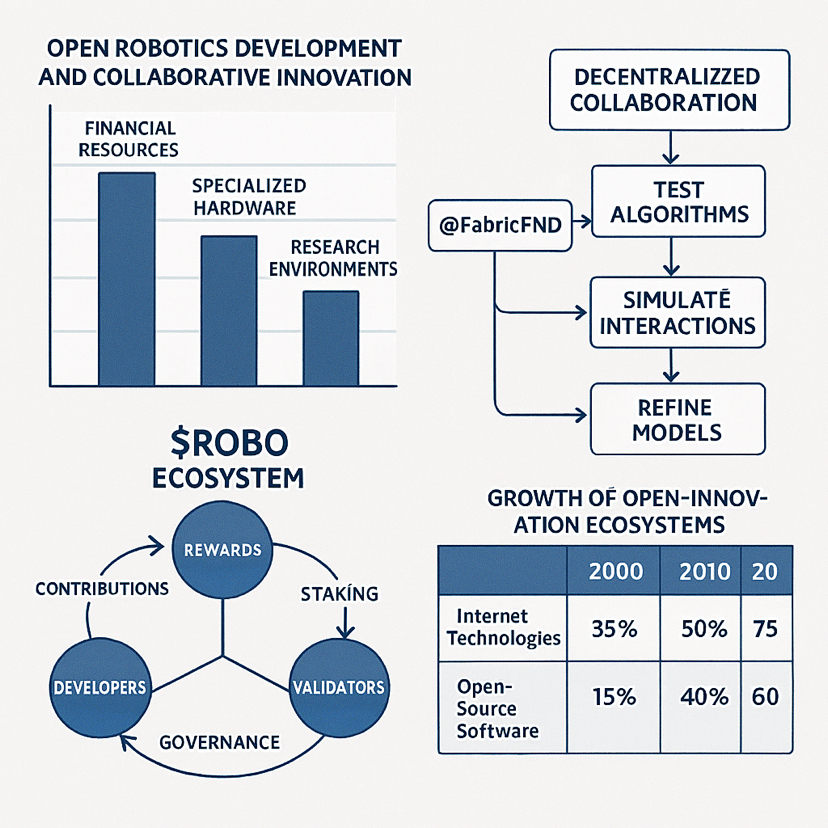

L'$ROBO cosistema esplora come il coordinamento decentralizzato possa supportare lo sviluppo della robotica aperta consentendo ai contributori di accedere a ambienti condivisi per formazione, sperimentazione e ricerca nell'apprendimento automatico.
Questi ambienti collaborativi potrebbero consentire ai partecipanti di:
• testare nuovi algoritmi per sistemi robotici
• simulare interazioni robotiche in ambienti virtuali
• affinare i sistemi di controllo e i modelli di apprendimento automatico
Questo approccio riflette il modello di innovazione aperta che ha contribuito ad accelerare la crescita delle tecnologie internet e delle comunità di software open-source. Quando gli sviluppatori possono collaborare oltre confini e organizzazioni, l'innovazione spesso progredisce in modo significativamente più veloce.
Se principi simili vengono applicati con successo alla robotica, le reti di collaborazione decentralizzate potrebbero sbloccare livelli completamente nuovi di sperimentazione e creatività nello sviluppo dell'intelligenza artificiale.
Man mano che la robotica e l'intelligenza artificiale continuano a evolversi, ecosistemi aperti come quello supportato da @Fabric Foundation e dal token $ROBO potrebbero giocare un ruolo importante nel plasmare il futuro dell'infrastruttura robotica collaborativa.
#robo $ROBO #Web3 #decentralizedai